本文围绕跨域时间同步技术展开,作为智能汽车“感知-决策-执行-交互”全链路的时间基准,文章介绍了PTP、gPTP、CAN等主流同步技术及特点,并以黑芝麻智能武当C1296芯片为例,通过多方式同步实现多域高精度对齐,消除时钟信任鸿沟的实测效果。
智能汽车的核心是通过多维度感知、实时决策和精准控制实现辅助驾驶与智能交互,而这一切的前提是“时间基准一致”,由于不同传感器采集数据的频率、机制不同,只有在时间基准一致的情况下,数据融合、控制反馈才能准确进行,时间基准不一致的情况下就会产生环境感知错误、目标跟踪紊乱、控制指令错误、系统协调混乱等情况。时间同步技术看似基础,却是保障智能汽车安全、高效运行的“隐形骨架”。
时间同步:分布式系统的“隐形时钟管家”
时间同步技术是指通过硬件、协议或算法,使多个独立系统、设备或节点的时钟基准保持一致(或误差控制在可接受范围)的技术体系。其核心是消除不同时钟源的“时间偏差”,确保数据采集、传输、处理在“统一时间维度”上有效关联。
从精度维度看,时间同步技术可覆盖从毫秒级(ms)到纳秒级(ns)的需求,常见实现方式包括:
*卫星授时(如GPS、北斗,提供绝对时间基准,精度达几十纳秒)。
*网络协议同步(如NTP用于毫秒级同步,PTP/IEEE 1588用于微秒至纳秒级同步)。
*硬件时钟校准(如通过晶振+算法修正漂移,确保短期稳定性)。
时间同步对智能汽车的作用:核心技术基石
智能汽车是“多传感器融合+车联网交互+辅助驾驶决策”的复杂系统,时间同步技术是智能汽车“感知-决策-执行-交互”全链路的“时间基准锚点”,对内,它保障多传感器数据融合的准确性,避免因时间偏差导致的感知错误;对外,它支撑车联网交互的可靠性,确保V2X信息的实时性与有效性;对安全,它是辅助驾驶决策与执行的“时序保障”,直接关系到车辆与行人的安全。具体作用体现在以下场景:
*确保多传感器数据融合的准确性
*保障车联网(V2X)交互的可靠性
*支撑高精度定位与路径规划
*提升辅助驾驶决策与执行的安全性
*满足数据记录与追溯的合规性
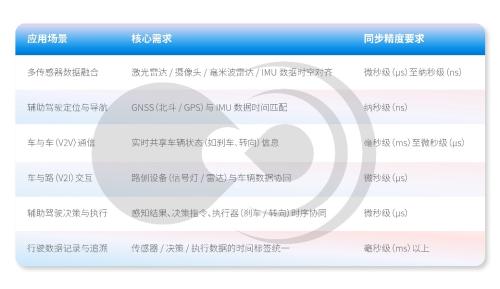
时间同步技术在智能汽车典型场景中的应用
主要时间同步技术方案
常见的时间同步包括:PTP(精确时间协议,Precision Time Protocol),gPTP(广义PTP,Generalized PTP),CAN(控制器局域网,Controller Area Network)时间同步,ToD/PPS(时间日期/秒脉冲,Time of Day/ Pulse Per Second),NTP(网络时间协议,Network Time Protocol)等。
PTP
PTP时间同步基于IEEE 1588标准,通过主从节点间的时间戳交互,实现纳秒级精度的时间同步。PTP同步流程通过四次握手计算时间偏差(Δ)和链路延迟(Delay):

PTP时间同步流程Sync:主时钟发送同步报文,记录发送时间t1。Follow_Up:主时钟补发t1,从时钟接收后计算t1 + Delay + Δ = t2。Delay_Req:从时钟发送延迟请求,记录发送时间t3。Delay_Resp:主时钟补发t4,从时钟计算t3 + Delay - Δ = t4。
其关键机制包括:
*边界时钟(BC):作为时间中继节点,同步上游主时钟并向下游分发时间。
*透明时钟(TC):交换机/路由器记录报文在设备内的驻留时间(Correction Field),补偿链路不对称性。
*双步模式:主时钟通过Sync报文发送时间戳,Follow_Up报文补发精确时间,适用于非硬件时间戳设备。
在PTP时间同步中,有E2E(End - to - End,端到端)和P2P(Peer - to - Peer,对等)两种不同的延迟测量机制,其中,E2E部署简单(中间设备无需支持PTP)、成本低、兼容性好,但是同步精度较低(误差易累积),故障排查困难(无法定位中间设备问题),难以满足高精度场景;P2P同步精度高(逐段测量延迟,纳秒级),故障定位清晰(可追溯具体链路/设备),适合复杂高精度场景。但部署复杂、成本高,兼容性要求严格。PTP同步常用于工业自动化(高精度控制)、电力系统(智能电网同步)、音视频同步(AVB)、5G基站同步。
gPTP
gPTP时间同步基于IEEE 802.1AS标准,专为以太网时间敏感网络(TSN)设计,优化低延迟场景下的同步效率。gPTP关键技术包括:
*Peer Delay机制:测量相邻设备间的单向延迟,要求网络设备支持透明时钟或边界时钟。
*TDMA调度:结合802.1Qbv时间感知整形,实现周期性数据的无冲突传输,确保μs级同步精度。
gPTP同步常用在车载以太网(辅助驾驶传感器同步)、工业物联网(IIoT设备低延迟协同)、实时音视频传输(如AVB音频系统)。
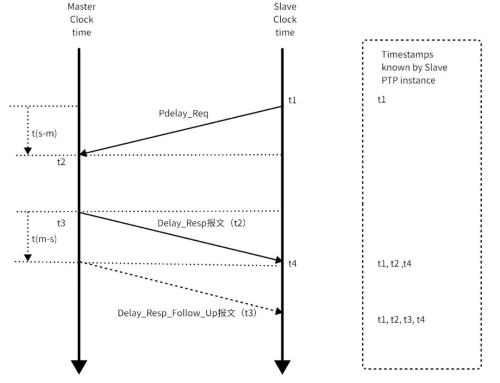
gPTP时间同步流程
lPdelay_Req:Requester发送Pdelay_Req报文并标记该报文发出时刻的时间戳t1。
lPdelay_Resp:Responder接收Pdelay_Req报文并标记该报文到达时刻的时间戳t2,随后Responder发送Pdelay_Resp报文并标记该报文发出时刻的时间戳t3,Pdelay_Resp报文携带时间信息t2,Requester接收Pdelay_Resp报文并标记该报文到达时刻的时间戳t4。
lPdelay_Resp_Follow_Up:Responder发送Pdelay_Resp_Follow_Up报文并携带t3时间信息。
时间偏差(Δ)和链路延迟(Delay):
CAN时间同步
CAN总线作为分布式控制网络,时间同步依赖消息周期性与时间戳机制,精度约微秒级。CAN时间同步是基于消息的同步:
*主节点周期性发送同步消息(如包含时间戳的特定ID帧)。
*从节点通过接收消息的时间间隔调整本地时钟(频率同步),或直接采用消息中的时间戳(相位同步)。
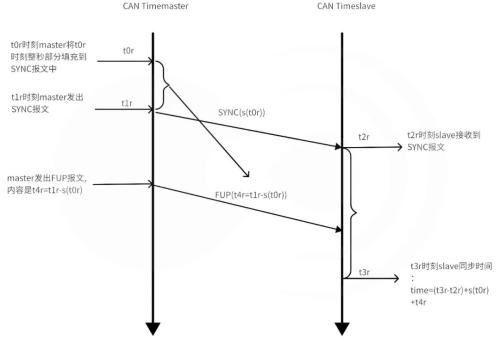
CAN时间同步流程实现方式
*无专用协议:通常依赖应用层自定义逻辑,而非标准协议栈。
*挑战:CAN总线带宽有限(最高1Mbps),同步消息频率受限,精度低于PTP/gPTP。
CAN时间同步常用在车载电子(ECU分布式控制,如引擎、刹车系统协同)、工业现场总线(低速传感器网络)。
ToD/PPS同步
ToD/PPS同步将ToD和PPS组合使用,PPS提供秒级对齐,ToD提供完整时间信息,两者结合实现高精度同步(如GPS接收机同时输出PPS和NMEA时间数据)。
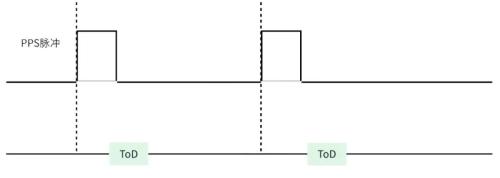
ToD和PPS
*ToD(时间日期):通过串口(如RS-232/485)或网络(如NTP)传输具体时间,精度取决于传输延迟(毫秒级~秒级)。
*PPS(秒脉冲):硬件信号(如TTL电平)每秒发送一个脉冲,上升沿对应精确秒起始点,精度可达纳秒级(依赖硬件时钟源,如GPS、原子钟)。
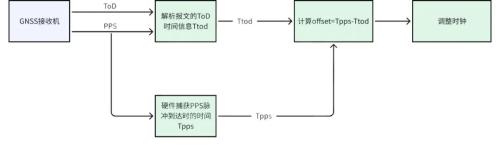
以GNSS方式为例的ToD/PPS同步过程
接口与协议
*物理层:PPS为差分或单端电平信号,ToD常用ASCII格式(如NMEA 0183)或二进制协议(如IRIG-B)。
*同步流程:设备通过PPS校准秒边界,通过ToD更新时间戳,消除累计误差。
ToD/PPS同步常用在金融系统(交易时间戳)、电信基站(GPS同步)、工业设备(外部基准时间源接入)。
NTP同步
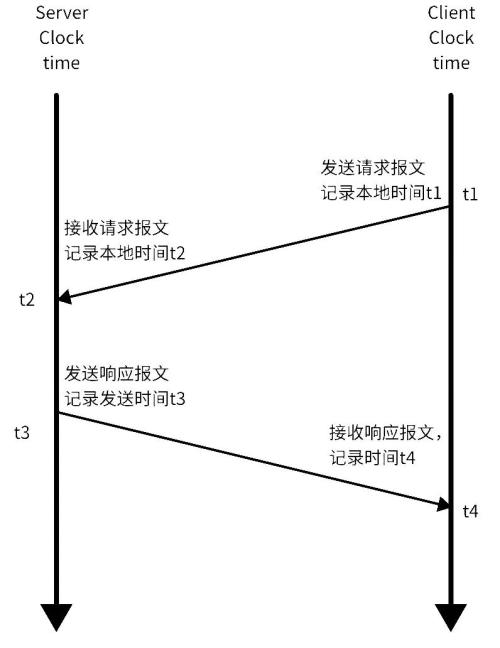
NTP工作在应用层,一般基UDP协议(端口号123),采用客户端-服务器架构实现时间同步。其核心通过时间戳交换计算时间偏差和网络延迟,典型的NTP交互过程包含四次报文传输。
NTP同步层次化结构采用Stratum等级体系来确定时间源的层级。Stratum0为最精确的时间源,通常是原子钟或卫星时间接收器;Stratum1服务器直接与Stratum0设备相连;Stratum2服务器从Stratum1获取时间,依此类推。层级越低,时间精度越高,一般局域网内NTP同步精度可达5ms ,广域网中精度为几十毫秒。
NTP广泛应用于互联网服务、企业办公网络、日志管理等场景。例如,在大型网站服务器集群中,通过NTP确保各服务器时间一致,便于日志分析和用户行为追踪;在企业办公网络中,为计算机、打印机等设备提供统一时间基准。
NTP时间同步流程
各同步方案技术对比

时间同步评价指标
时间同步技术的测量与评价需围绕“同步精度”“稳定性”“可靠性”等核心维度展开,不同场景(如智能汽车、工业控制、通信网络)的指标侧重略有差异,但基础指标体系一致。以下是时间同步技术的关键测量评价指标:
精度指标
用于衡量时间同步的“准确性”,即两个时钟的时间偏差程度:
时间偏差(TimeOffset):两个时钟(如本地时钟与参考时钟)在同一时刻的时间差值,公式为:偏差=本地时钟值-参考时钟值。时间偏差直接反映同步误差的绝对值,是最基础的精度指标。例如,智能汽车传感器同步要求偏差≤1μs,否则会导致数据融合错位。
同步精度(Synchronization Accuracy):经过同步后,系统中所有时钟与参考时钟的最大允许偏差范围。单位:纳秒(ns)、微秒(μs)、毫秒(ms)等,根据场景需求而定(如智能汽车多传感器融合需≤100ns,V2V通信需≤1ms)。
稳定性指标
用于衡量时间同步的“长期一致性”,即时钟偏差随时间的波动程度。
时钟漂移(Clock Drift):时钟因硬件(如晶振)误差导致的频率偏移,表现为时间偏差随时间逐渐增大的速率(单位:ppm,即百万分之一)。
抖动(Jitter):短时间内(如毫秒级)时钟偏差的随机波动,通常用偏差值的标准差表示。抖动反映同步的短期稳定性。例如,智能汽车V2X通信中,抖动过大会导致信息接收时间不确定,影响实时决策。
可靠性与效率指标
用于衡量同步技术的“实用性”和“鲁棒性”。
同步建立时间(Synchronization Time):系统从启动到达到目标同步精度所需的时间。对动态场景至关重要。例如,智能汽车启动后需快速完成传感器同步(如≤1秒),否则自辅助驾驶功能无法及时激活。
同步保持时间(Holdover Time):当参考时钟(如卫星信号)丢失后,系统依靠本地时钟维持同步精度的最长时间。
抗干扰能力:在网络延迟、信号丢包、电磁干扰(EMI)等环境下,维持同步精度的能力。抗干扰能力通过丢包率(如5%丢包时的同步偏差变化)、电磁兼容(EMC)测试(如汽车电子环境下的抗干扰性能)衡量。
资源开销:同步过程占用的计算资源(CPU/内存)和网络带宽。智能汽车域控制器算力有限,需选择轻量化协议(如简化版PTP),避免资源浪费影响核心功能。
场景化衍生指标
在智能汽车等特定领域,还需结合应用需求定义细分指标:
跨域同步一致性:智能汽车的感知域、决策域、执行域之间的时钟偏差(如决策指令与执行器响应的时间差)。
V2X时间戳有效性:车与车/路通信中,时间戳的可信度(如防止恶意节点伪造时间信息导致的安全风险)。
日志时间可追溯性:车辆行驶数据的时间标签与绝对时间(如北斗授时)的偏差,需满足法规要求(如欧盟UN R155标准)。
C1296跨域时间同步的场景实测
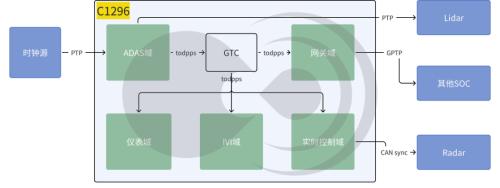
黑芝麻智能武当C1296芯片包括:ADAS域、IVI域、功能安全域、实时控制域、网关域、仪表域等多个子系统,以及CPU、GPU、NPU、ISP、DSP等多个内部模块。在C1296芯片中,提供了丰富的硬件接口,支持硬件戳和硬件PTP时钟,可以实现亚微秒级、高精度的时间同步,各个模块都有可能作为内部的主时钟源。此外,C1296芯片还支持作为end station同步到外部时钟源,可以对激光雷达或其他处理器进行授时。
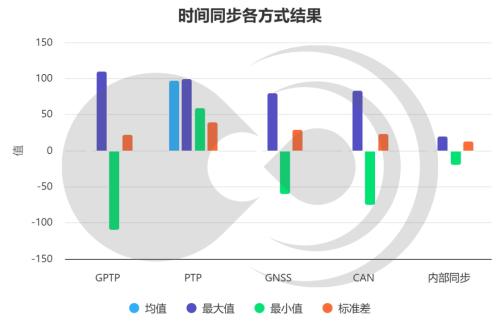
空负载下C1296上各同步方式实测(单位:ns)
场景1:使用switch域的多样化时间同步方式完成时间同步场景搭建
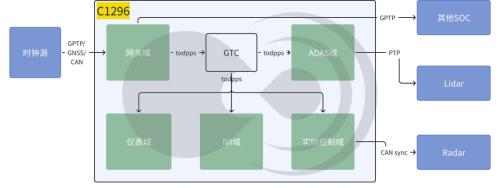
C1296芯片网关域集成多个硬件时钟,即可以独立使用保证时钟隔离也可以硬件同步保持时钟一致性,并且网关域支持多种同步方式:gPTP时间同步、CAN时间同步、GNSS时间同步等,满足从时钟源同步时间后同时给其他域及其他外部设备提供时间同步功能。
在场景1中,网关域一方面作为从时钟通过GPTP(CAN/GNSS)同步方式从时钟源同步时间,另一方面作为主时钟通过内部ToD/PPS方式给C1296内的其他子系统同步时间,不仅如此,网关域还可以通过gPTP同步方式给场景内的其他支持gPTP同步的外设同步时间。同时C1296的ADAS域支持PTP时间同步给Lidar等传感器外设授时,实时控制域支持CAN同步方式给Radar等传感器外设授时。
C1296网关域给芯片内其他子系统进行同步时间时,会使用到GTC单元,GTC(Global Timebase Counter)是在C1296内部的一个连续运行的64位累加计数器,以恒定的时钟频率持续累加。网关域作为内部主时钟周期性触发PPS信号并通过GTC传递到其它各子系统,GTC同时锁存信号到达时对应的计数值。网关域发送PPS信号成功后会广播该PPS信号的PHC时间和GTC锁存计数,这样其它各子系统就可以对齐ToD和PPS时间实现ToD/PPS方式同步。

场景2:使用辅助驾驶域的丰富接口搭建适配不同的时间同步场景需求
C1296芯片ADAS域支持硬件戳和硬件PTP时钟,集成PTP时间同步和NTP时间同步等方式,可以从时钟源同步时间,同时给其他域和外部终端提供时间同步功能。ADAS域提供系统的SDK和示例,支持时间同步方式的开发定制。
在场景2中,ADAS域一方面作为从时钟通过PTP同步方式从时钟源同步时间,另一方面作为主时钟通过内部ToD/PPS方式给C1296内的其他子系统同步时间,不仅如此,ADAS域还可以通过PTP同步方式给场景内的其他外设如Lidar授时,实时控制域支持CAN同步方式给Radar等传感器外设授时,网关域支持gPTP同步方式给场景内的其他支持gPTP同步的外设同步时间。

C1296芯片的网关域、ADAS域、实时控制域等都具有硬件PTP时钟,支持硬件时间戳。同步协议上支持和集成了gPTP、PTP、CAN、NTP、ToD/PPS同步等多种同步方式,如此,各个域都可以作为内部的主时钟源从外部时钟源同步时间并进行内部时间同步。此外,各域还支持作为时钟源对激光雷达或其他处理器进行授时。
基于C1296芯片,结合C1296跨域时间同步技术,可以快速、灵活搭建多域场景的时间同步解决方案,实现各域时间线的高精度对齐,消除多域计算单元的时钟信任鸿沟。




















 扫一扫关注微信
扫一扫关注微信
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}