据外媒报道,莱斯大学与马里兰大学的工程师们研发了一种全动态视频技术,可能用于制造新型摄像头,帮助摄像头穿透雾、烟、暴雨、浑浊的水、皮肤、骨头以及其他反射散射光线及遮挡物体的介质观察环境。
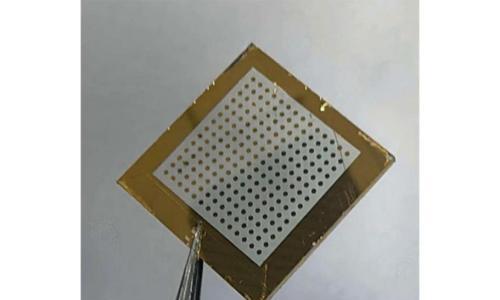
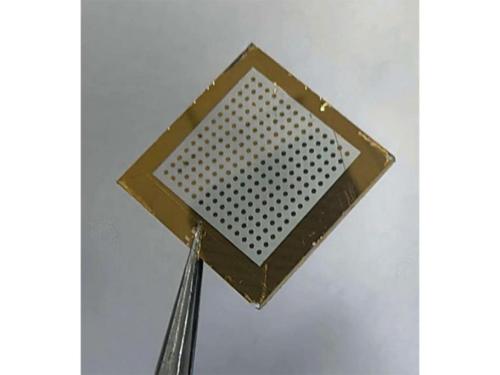
NeuWS技术实验(图片来源:莱斯大学)
莱斯大学Ashok Veeraraghavan表示:“在光学成像上,通过散射介质成像是一个“圣杯问题”(大家都想解决的问题),散射会让光在很多情况下无法使用,因为光的波长会更低,导致空间分辨率更高。如果可以消除散射的影响,成像才能发展得更好。”
Veeraraghavan所在的实验室与马里兰大学ChristopherMetzler的研究小组合作,创造了一种名为NeuWS(neural wavefront shaping,神经波前成形)的技术,这也是该项技术的关键。
Veeraraghavan表示:“对于研究自动驾驶汽车的人而言,面临的最大挑战就是恶劣天气。在恶劣天气下无法进行良好的成像。虽然说的是恶劣天气,专业术语而言就是光散射。对于生物学家而言,显微镜面临的最大挑战就是无法对活体深层组织进行成像。说的是“深层组织”和“活体组织”,实际上是想要看穿皮肤以及其他组织层,因为这些会散射光线。如果问水下摄像师最大的挑战是什么,他们会说,我只能对离我近的东西进行成像。他们的真正意思是光在水中会散射,因此光无法深入水中,聚焦远处的物体。所有这些的真正技术问题就是光散射。”
Veeraraghavan指出,NeuWS可被用来克服上述情况中出现的光散射问题。“就切实解决这个问题而言,我们向前迈出了一大步。在真正在上述应用领域建立原型之前,还有很多工作要做,但是我们展示的方法可覆盖上述领域。”
从概念上看,NeuWS基于光波两个关键属性的复杂数学原理而研发,而且这两个关键属性可在任何给定位置进行计算。首先是幅值,这是波在该位置所携带的能量;其次是相位,这是波在该位置的振荡状态。Metzler和Veeraraghavan表示,测量相位对于克服散射现象非常关键,但是因为可见光的高频特性,直接测量相位是不切实际的。















 扫一扫关注微信
扫一扫关注微信
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}