据外媒报道,为了确保各种安全关键系统可以安全运行,并根据需要工作,密歇根州立大学(Michigan State University)的研究人员开发出一种方法,可为在未知环境中运行的系统设计具有学习能力的安全控制器。
此项研究由密歇根州立大学的Bahare Kiumarsi和Zahra Marvi联合展开,重点关注自动驾驶汽车在市区的安全操作。
随着时间的发展,科学家们已经成功设计出基于控制屏障功能(CBF)的安全控制方法,可以在很多领域应用,包括自适应巡航控制、机器人安全控制和无碰撞多智能体系统。这些方法通常可结合CBF和Lyapunov函数来证明控制器的安全性和稳定性。而密歇根州立大学的研究人员提出新颖的支持学习的归零控制屏障功能(ZCBF),能够在学习的同时安全操作,即使环境中存在未知的动态。
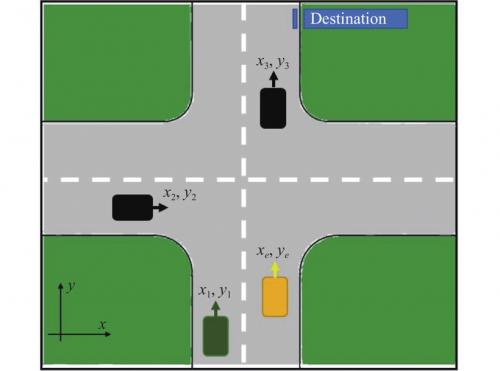
随着越来越多的安全关键系统部署在现实世界中,科学家们必须能够确保这些系统时刻保证安全。环境中的不确定因素会影响系统的安全运行。当在城市环境中研究自动驾驶汽车时,研究人员必须考虑这些不确定因素。例如,自动驾驶汽车、半自动驾驶汽车、人类驾驶汽车和行人会出现在同一区域内。
因此,科学家们必须设计一种控制器,以确保系统安全运行,尽管在同一空间中导航的其他车辆和人类的行为方式存在不确定性。科学家们需要能够依靠系统的安全性,同时还要让系统尽可能地运行。密歇根州立大学研究人员的方法解决了如何为必须在不确定环境中运行的系统设计具有学习能力的安全控制器的问题。其新颖的学习方法能够保证自动驾驶汽车的安全,即使在与道路上其他车辆的不确定行为一起运行时也是如此。
现有的安全控制方法要求科学家对安全集有完整的了解。在环境存在不确定性的情况下,为系统设计安全控制变得更具挑战性。这些安全关键系统必须能够快速了解不确定性,同时实现最大的安全性能。缓慢的模型学习方法可以提供所需的安全功能,但无法达到预期的性能。基于最小化建模误差的简单模型学习方法也无法达到所需的安全要求,即使预期的估计误差会随着时间的推移而减少。博士候选人Zahra Marvi表示:“需要新的学习算法来尽可能避免对安全集的误传。”研究人员开发的方法能够快速了解环境中的不确定性并迅速实现安全性能。
助理教授Bahare Kiumarsi表示:“满足安全约束至关重要,在控制设计阶段就需要考虑到,否则会引发严重后果。通过使用密歇根州立大学研究人员设计的这种方法,系统中的控制器可以采取更少的保守动作,从而获得更好的性能,进而提高系统的安全性和性能。



























 扫一扫关注微信
扫一扫关注微信
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}