作者|寒星1999
来源| IND4汽车人app
现在说起防抱死系统ABS,基本上底盘工程师都能巴拉一串的功能来,“Antilock Braking system,根据车轮转速与车速进行比较,判断当前车轮是否存在抱死滑移,从而对它进行必要的液压干预….”

这样的理论非常的好理解。轮速由ABS模块芯片计算获得,定时采集四个轮速传感器所发出的脉冲信号,车轮一圈的脉冲数是固定的,对获得的脉冲数进行微分就得到了车轮转速,而转速与车轮半径的乘积就是车轮的线速度。

四个车轮的车速容易获得,但整车的实际前进车速怎么获得?如上图中的V怎么获得,我们并没有发现ABS系统中有额外的测速装置,比如GSP\第五轮等等装置。实际上,实际车速V的获取还是依靠四个轮速获取,今天我们就来聊一聊参考车速的几种算法。
一从易到难
汽车有四个轮子,实际车速的算法要复杂的多,为了增强带入感,我们不妨先从简单的摩托车入手。我们知道,车辆制动的时候重量会向前转移,换句话说,制动的时候,前轮的贡献要远大于后轮。而摩托车只有一个前轮、一个后轮子,所以对于摩托车来说,那逻辑就很简单了。后轮的轮速作为参考车速的依据而对前轮进行控制,相当于对后轮进行了实时限压。损失一部分的后轮制动力来保证前轮足够的制动力,而前轮才是制动过程中的主角。
下图为BMW 1200GS,也是寒星流口水中的一台车,嘿嘿….

骑摩托车的都知道,弯道内,如果前轮抱死则必摔无疑,所以保证前轮不抱死是摩托车ABS最重要的使命。

摩托车的ABS控制逻辑很简单,右手控制前轮、右脚控制后轮。


作为摩托车的ABS是两通道模块,右手控制前轮、右脚控制后轮。

二汽车的参考车速算法
在了解了摩托车的参考车速算法逻辑之后,我们来看看四轮汽车的算法,其实对于汽车来说,制动时的重量转移同样存在,所以参考车速更多的还是依赖于后轮的计算,只不过有多种的校验方式。
(1)平均轮速法
顾名思义,平均轮速法,就是将两个后轮的车轮速度取平均值作为参考车速。
V=(Vrr Vrl)/2
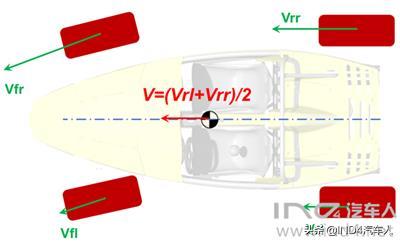
平均车速法计算参考车速,最大的一个优势就是准确度高!尤其在弯道内能真实的表达出车辆的真实车速。而且对路面的识别成都较高,比如对接、对开…都能很快的识别出来。当然事物都是有两面性,平均车速法对两个后轮的牺牲比较大,车辆的制动性能,最大减速度就打了折扣.
(2)最大车速法
最大车速法就是四个车轮中取最大轮速的作为参考车速的判断依据。
V=Vfr

最大车速法的最大优点是无须路面识别,没有高低选,另外几乎不对车轮的制动力有牺牲。所以,最大减速度可以达到一个很高的水平。但最大车速法的缺点也很明显,这种方法所确定的参考车速由于受到轮速调节的影响,与实际车速偏差较大,尤其在弯道内与实际车速的偏差更大。
(3)对斜率
斜率法通过对大量试验数据的分析处理,确定车辆在各种制动工况下所能达到的平均减速度。以此为依据,在控制过程中,采集制动初始速度V0进行路面状况和制动工况识别后,确定车辆减速度a",根据公式VT=V0 at实时计算速度值作为参考车速。
斜率法其实就是通过大量的实验,确定了不同初速度,不同路面下的减速度拟合成了一个3D数据库,在制动的时候根据初速度、加速度进行查值获取下一时刻的速度值。

斜率法是早期的实验室研究方法,在实际的工程中并没有应用的价值。因为它的适应性是在太差了,只要所面对的路况、工况与Map中出现偏差,系统就会出现较大的误差。比如如果从一个低附的冰面突然到了高附的沥青路(对接路),系统根本无法判断这种的工况,等再次建立起回馈,早已时过境迁….
(4)综合法
综合法是将最大轮速法和斜率法分别实时计算选取大者作为参考车速。该方法具有斜率法和最大轮速法的优点,同时不用设定初始速度,具有很好的稳定性和精度。但仍存在着需要路面识别,确定车身减速度的缺点,自适应能力较差。
(5)其他方法在参考车速的计算中还有很多理论的方法,比如基于动力学模型的仿真算法;基于卡尔曼滤波方法的递推算法等等。
三总结
虽然对于参考车速的计算,现在学术界存在多种的理论方法。但工程界考虑更多的还是在硬件、软件上实施的可行性、算法的稳定性。所以现在真正写入程序,根植于硬件里的还是以平均车速和最大车速法这些看似简单却有效的方法,毕竟车辆不是每次制动都是最大制动力。在达到最大制动力时有一个鲁棒性不错的模糊控制总比一个鲁棒性很差的精确控制要好的多。


























 扫一扫关注微信
扫一扫关注微信
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}